 Dynamics Body Tag 动力身体标签Basic 基础Dynamics 动力学Collision 碰撞Mass 弥撒Force 警队Soft Body 柔软的身体Cache 缓存
Dynamics Body Tag 动力身体标签Basic 基础Dynamics 动力学Collision 碰撞Mass 弥撒Force 警队Soft Body 柔软的身体Cache 缓存
Soft Body
柔软的身体
In contrast to Rigid Bodies, Soft Bodies can be deformed. A Rigid Body consists of a hard polygonal body that only reacts to collisions as a whole; a Soft Body is made up of numerous small mass points (object points) that are connected with each other via numerous springs. If a force effects a Soft Body its effect will spread across other surrounding points from a local point of impact, resulting in a flexible (organic) reaction to the force. Soft Bodies are basically used for deformable objects such as balls, cloth (don’t forget about using the Cloth function for cloth/clothes), thin metal, etc.
与刚体相比,软体可以变形。一个刚体由一个硬的多边形物体组成,它只对作为一个整体的碰撞作出反应; 一个软物体由许多小质量点(物体点)组成,这些质量点通过许多弹簧彼此连接。如果一个力影响到一个柔软的物体,它的影响将从一个局部的冲击点扩散到周围的其他点,从而导致对力的灵活(有机)反应。软体基本上是用来变形的物体,如球,布(不要忘记使用布的功能,布/衣服) ,薄金属等。
Splines can also be used as Soft Bodies. However, they are better suited for simple objects. They don’t work well with Connectors and could only be used in a limited fashion as a rope, for example. However, a Spline can be used in conjunction with collision to make it fall onto and lie on another object.
样条也可以用作软体。然而,它们更适合于简单的对象。它们不能很好地与 Connectors 一起工作,例如,只能以有限的方式作为绳子使用。但是,样条曲线可以与碰撞结合使用,使其落在另一个物体上。
Splines work especially well under the following circumstances:
在下列情况下,样条尤其有效:
When using the Sphere primitive, make sure that the Icosahedron option is selected. The Render Perfect option should also be disabled.
当使用球面原语时,确保选择了二十面体选项。渲染完美选项也应该被禁用。
柔软的身体

Here the following is defined:
这里定义了以下内容:
休息州
The rest state is normally the state of the Spring at its normal length without any modification.
静止状态通常是没有任何修改的弹簧在其正常长度上的状态。
Additional rest states can be added to this field (copies of the Soft Bodies in the Object Manager; equal number of points required) or even animated. This means that a Soft Body can be made to successively assume different states.
其他的静止状态可以添加到这个字段中(在对象管理器中的软体的副本; 需要等量的点) ,甚至是动画。这意味着一个软体可以连续地呈现不同的状态。
The object (its position, orientation, visibility irrelevant) in this field can, for example, be deformed using a Deformer and will immediately pass this rest state to the Soft Body, which will convert to this new state with an oscillating motion. A "dynamic morph", if you will.
例如,物体(其位置,方向,可见性无关)在这个领域可以变形使用一个变形器,并将立即通过这个静止状态的软体,它将转换到这个新的状态与振荡运动。一个“动态变体” ,如果你愿意的话。
How quickly the Soft Body assumes the new shape/state depends on its defined stiffness. The softer the Springs the longer it will take. If hard Springs are used, it will more-or-less "explode" into its new state. This parameter can be used to create many spectacular effects!
软体以多快的速度呈现新的形状/状态取决于它的定义刚度。弹簧越软,需要的时间就越长。如果使用硬弹簧,它或多或少会“爆炸”进入新的状态。这个参数可以用来创造许多壮观的效果!
海量地图
Normally a Soft Body’s entire mass will be spread across its object points equally. If this is not desired, you can use the Point Selection tag or Vertex maps to influence the object.
正常情况下,一个软体的整个质量将平均地分布在它的物体点上。如果不希望这样,您可以使用点选择标记或顶点映射来影响对象。
Note that object points with a mass of 0 will be fixated at their current location (this can be done with MoGraph Selection for Soft Bodies that are made up of clones).
请注意,质量为0的物体点将固定在其当前位置(这可以通过 MoGraph Selection for Soft Bodies that are made of clones 来完成)。
Different dispersions of mass result in different oscillating behavior and different centers of mass.
质量的不同色散导致不同的振荡行为和不同的质心。
使用精确求解器
If enabled, a more stable but also more memory-intensive algorithm will be used. You can disable this option and see if your simulation remains stable. You can also slowly increase the Steps per Frame value if you do experience instable behavior.
如果启用,将使用一个更稳定但也更占用内存的算法。您可以禁用此选项并查看您的模拟是否保持稳定。如果遇到不稳定的行为,也可以慢慢增加每帧的步骤值。
Generally speaking, this parameter dampens the oscillation of Soft Bodies, which means Soft Bodies will reach their Rest State more quickly.
一般来说,这个参数抑制了软体的振动,这意味着软体会更快地达到静止状态。
春天
 Typical arrangement of various types of Springs.
Only the complete Springs of visible points are pictured. 各种类型弹簧的典型排列。只有可见点的完整弹簧被描绘出来
Typical arrangement of various types of Springs.
Only the complete Springs of visible points are pictured. 各种类型弹簧的典型排列。只有可见点的完整弹簧被描绘出来
To turn a normal object into a Soft Body, all object points will be regarded as small masses that are connected via 3 types of Springs (in the following also referred to as "standard spring types"). Each spring type can be adjusted separately and fine-tuned at point level via Point Selection tag or Vertex
为了将一个普通的物体变成一个柔软的物体,所有的物体点将被视为通过3种弹簧连接的小质量(在下面也称为“标准弹簧类型”)。每个弹簧类型可以单独调整和微调点水平通过点选择标签或顶点
maps.
地图。
Normally all Springs are at their rest state at frame 0, i.e., all Springs exert a force of 0 in this Soft Body state (of course Rest Length has to be set to 100%). As soon as the simulation is started, gravity will affect the mass points and Springs will begin to oscillate.
正常情况下,所有弹簧在0帧处于静止状态,也就是说,所有弹簧在这种软体状态下施加0的力(当然静止长度必须设置为100%)。一旦模拟开始,重力将影响质量点,弹簧将开始振荡。
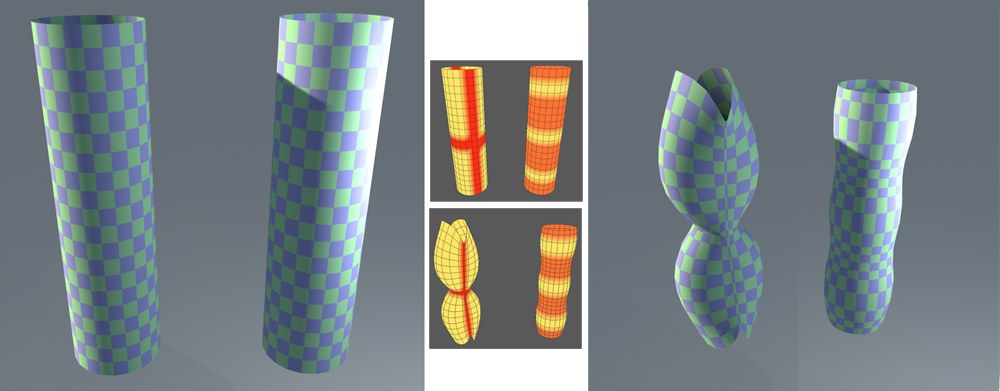
We will demonstrate using the following Soft Body, which is attached to Connectors on one end (left) and falls onto the bar below it. When all three Spring types are applied, the following should result (if the object has a greater subdivision the Spring strength must be increased accordingly to achieve the same result):
我们将演示如何使用下面的软件主体,它连接到一端(左)的连接器上,然后落到它下面的工具条上。当应用所有三种 Spring 类型时,应该会得到以下结果(如果对象有更大的细分,那么 Spring 强度必须相应地增加以达到相同的结果) :

结构图[0. . + ∞]
A Spring will be attached to each object point that connects it with all neighboring points along the polygon edge. The value defines the stiffness of the Spring. The harder the Spring the greater the stiffness. How this Spring works can best be seen if Structural is set to 0:
一个 Spring 将被附加到每个对象点上,这个对象点将连接到沿着多边形边缘的所有相邻点。该值定义了弹簧的刚度。弹簧越硬,硬度越大。如果将 structure 设置为0,那么这个 Spring 是如何工作的:

The Structure Spring’s primary function is to support the Soft Body’s outer shape. At the right of the image above the supporting effect of the Spring has been set to 0, causing the polygons to simply fall to the floor.
结构弹簧的主要功能是支持软体的外部形状。在图片的右上方,Spring 的支撑效果被设置为0,导致多边形简单地掉到地板上。
阻尼[0. . + ∞% ]映射
Damping defines the degree of oscillation of the Structure Spring. The greater the value, the faster the oscillation will end.
阻尼决定了结构弹簧的振动程度。值越大,振动结束的越快。
The Map setting (Point Selection tag or Vertex mpas) lets this be adjusted on point level. The following applies for point selections:
地图设置(点选择标记或顶点 mpas)允许在点级别上进行调整。选择点的方法如下:
… and for Vertex maps depending on individual weighting.
... 和顶点地图取决于个人权重。

弹性极限[0. . + ∞% ]映射
A Soft Body’s Springs can be deformed plastically exactly like individual Springs (see also Elastic Stretch Limit) as soon as a specific stretching or compression point has been reached. A value of 0 will disable plastic deformation.
一个柔软的身体的弹簧可以塑性变形完全像个别弹簧(也见弹性拉伸极限) ,一旦达到一个特定的拉伸或压缩点。如果值为0,将禁用塑性变形。
Note that, depending on the Project, the Elastic Limit for the springs will also have to be adjusted to ensure a plastic deformation of the Soft Body.
注意,根据项目的不同,弹簧的弹性极限也必须调整,以确保软体的塑性变形。
The Map function is described here.
这里描述了 Map 函数。
剪切[0. . + ∞]地图
This Spring type diagonally connects opposing points of four-sided polygons and ensure that the polygon does not fold. The value defines the stiffness of the Spring. The greater the value, the harder/stiffer the Spring.
这种 Spring 类型的对角连接四边形的相对点,确保多边形不会折叠。该值定义了弹簧的刚度。值越大,弹簧越硬。
How this Spring works can best be seen when the Shear value is set to 0:
当剪切值设置为0时,可以最好地看出这个 Spring 是如何工作的:

Note how the polygons at the right were deformed to rhombuses. The disabled Shear Springs (value = 0) could not prevent the point rows from being altered.
注意右边的多边形是如何变形成菱形的。禁用的 Shear Springs (value = 0)无法阻止点行被更改。
阻尼[0. . + ∞% ]映射
Damping defines the degree of oscillation of the Structure Spring. The greater the value, the faster the oscillation will end. The Map function is described here)
阻尼决定了结构弹簧的振动程度。值越大,振荡结束的速度越快。这里描述了 Map 函数)
弯曲[0. . + ∞]地图
In contrast to the other Springs, the Flexion Springs are not linear Springs. They are torsion Springs that lie on each object point and try to maintain angular continuity - depending on Spring strength - along neighboring edges. This lets flexure be adjusted independently of the object’s stretch behavior (this was different in Dynamics versions prior to R11.5 where linear Springs were used, which were affected by the object’s stretch behavior). The value defines the stiffness of the Spring. The greater the value the harder/stiffer the Spring.
与其他弹簧相比,屈曲弹簧不是线性弹簧。它们是位于每个物体点上的扭转弹簧,根据弹簧的强度沿着相邻的边保持角度的连续性。这使得弯曲可以独立于物体的拉伸行为进行调整(这在 R11.5之前的 Dynamics 版本中是不同的,使用的是线性弹簧,受到物体拉伸行为的影响)。该值定义了弹簧的刚度。值越大,弹簧越硬。
How this Spring works can best be seen when the Flexion value is set to 0:
当 Flexion 值设置为0时,可以很好地看出这个 Spring 是如何工作的:

As you can see, polygons can be folded together when the Flexion Springs no longer maintain the angular continuity along neighboring polygons. With the Map option you can define specific regions in which the Soft Body should be allowed to fold.
正如你所看到的,当弯曲弹簧不再沿着相邻的多边形保持角度连续性时,多边形可以折叠在一起。使用 Map 选项,您可以定义软体应允许折叠的特定区域。
阻尼[0. . + ∞% ]映射
Damping defines the degree of oscillation of the Structure Spring. The greater the value, the faster the oscillation will end. The Map setting (Point Selection tag or Vertex mpas) lets this be adjusted on point level. The Map function is described here).
阻尼决定了结构弹簧的振动程度。值越大,振荡结束的速度越快。地图设置(点选择标记或顶点 mpas)允许在点级别上进行调整。这里描述了 Map 函数)。
弹性极限[0. . 180 ° ]地图
A Soft Body’s Springs can be deformed plastically exactly like individual Springs (see also Elastic Stretch Limit) as soon as a specific stretching or compression point has been reached. A value of 0 will disable plastic deformation.
一个柔软的身体的弹簧可以塑性变形完全像个别弹簧(也见弹性拉伸极限) ,一旦达到一个特定的拉伸或压缩点。如果值为0,将禁用塑性变形。
The Map function is described here.
这里描述了 Map 函数。
静止长度[1. . + ∞% ]映射
 A Vertex map in 一个顶点映射Rest
State 休息州 (the more intense the red, the less weighting and in turn less spring rest length). (红色越浓,重量越轻,反过来春天休息长度越少)
A Vertex map in 一个顶点映射Rest
State 休息州 (the more intense the red, the less weighting and in turn less spring rest length). (红色越浓,重量越轻,反过来春天休息长度越少)
In its rest state, the Soft Body has its unchanged shape. All Springs that are linked between the object points are at their rest state, which means that they exert no force. As soon as the simulation is started, gravity will affect the object points, followed by collisions. This displaces the neighboring object points and the Spring forces will start to take effect (the further the Spring is displaced in relation to its rest state the greater the force it must exert to return to its rest state). The Rest Length value lets you define a deviance in length of up to 100%. Values less than 100% will cause the Springs to contract and vice-versa. The Map function is described here).
在静止状态下,柔软的身体保持不变的形状。所有连接在物体点之间的弹簧都处于静止状态,这意味着它们不施加任何力。一旦模拟开始,重力会影响物体的各个点,接着是碰撞。这取代了邻近的物体点,春天力量将开始生效(春天相对于其静止状态的位移越大,它必须施加更大的力来回到其静止状态)。Rest Length 值允许您定义长度为100% 的偏差。小于100% 的值将导致 spring 收缩,反之亦然。这里描述了 Map 函数)。
撕出长度[1. . + ∞% ]映射
 The clone construct falls apart under its own
weight. 克隆体在自身的重量下分崩离析
The clone construct falls apart under its own
weight. 克隆体在自身的重量下分崩离析
These settings will be made available if Soft Body is set to Made of Clones. The Tear-out Length defines at which percentage of the rest state the Spring will break.
这些设置将提供如果软体设置为克隆制成。撕裂长度定义了 Spring 将中断的其余状态的百分比。
The Map setting applies only to the Cloner object ModeObject. It affects the object onto whose points the clones were placed.
Map 设置仅应用于 Cloner 对象 modem 对象。它影响克隆被放置在其点上的对象。
固定旋转[0. . + ∞]映射
If Soft
Body is set to
如果软体设置为克隆制成,你可以定义克隆在旋转方面的行为。较低的值(代表较小的弹簧强度)允许旋转,较大的值导致较硬的弹簧。
For Map the existing description applies.
对于 Map,应用现有的描述。
阻尼[0. . + ∞% ]映射
Use the Damping value to define how the Spring motion will be dampened (applies to the previously described Angle Springs). The larger the value, the faster the Spring will come to rest.
使用阻尼值来定义弹簧运动如何被阻尼(适用于前面描述的角弹簧)。值越大,春天就会停止得越快。
The Map function is described here.
这里描述了 Map 函数。
形状保护
 Shape Conservation 形状保护
maintains for the most part the shape of the Soft Body as a whole dependent on the 大多数情况下,保持软体的形状作为一个整体依赖于Stiffness 僵硬 value (with the exception of a few brief, minor deformations by local
collisions). 值(除了局部碰撞引起的一些短暂的、较小的变形)
Shape Conservation 形状保护
maintains for the most part the shape of the Soft Body as a whole dependent on the 大多数情况下,保持软体的形状作为一个整体依赖于Stiffness 僵硬 value (with the exception of a few brief, minor deformations by local
collisions). 值(除了局部碰撞引起的一些短暂的、较小的变形)
This function internally saves an image of the unmodified object and, depending on the defined Stiffness, attempts to maintain (conserve) this shape. The classic Soft Body variation with the 3 Spring types mentioned above tends to lose its initial overall shape because each object point’s Spring only "sees" its direct neighbor. The Stiffness values can be increased dramatically but this would result in the simulation becoming correspondingly unstable, which would in turn have to be compensated for by increasing the Steps per Frame value, resulting in higher memory requirements.
此函数内部保存未修改对象的图像,并根据定义的刚度,尝试维护(保存)此形状。上面提到的3种弹簧类型的经典软体变化趋向于失去其最初的整体形状,因为每个对象点的弹簧只能“看到”它的直接邻居。刚度值可以大幅度增加,但这将导致模拟变得相应不稳定,这反过来必须通过增加步骤每帧值来补偿,导致更高的内存需求。
Shape Conservation, on the other hand, is fast and stable. So whenever you need to maintain an initial shape (or specific regions via a map), apply these settings. Most often they work best when combined with the 3 Spring types (if they are not initially set to 0 but their values can be reduced).
形状保护,另一方面,是快速和稳定的。因此,无论何时您需要保持一个初始形状(或通过地图的特定区域) ,应用这些设置。最常见的情况是,当它们与3个 Spring 类型结合时工作得最好(如果它们最初没有设置为0,但是它们的值可以减少)。
This function is less suited for conserving the shape of an entire object with little to no stiffness such as cloth.
这个功能不太适合保存整个对象的形状,很少或没有硬度,如布料。
刚度[0. . + ∞]映射
 Flabio belly-flops onto the ground. At left a
lesser stiffness than at the right. Shown here is the (very short) rest state before he bounces back
up. 腹部松弛地落在地上。左边的僵硬程度比右边的小。这里显示的是(非常短的)休息状态之前,他反弹回来
Flabio belly-flops onto the ground. At left a
lesser stiffness than at the right. Shown here is the (very short) rest state before he bounces back
up. 腹部松弛地落在地上。左边的僵硬程度比右边的小。这里显示的是(非常短的)休息状态之前,他反弹回来
The Stiffness defines the degree to which the points of the Soft Body are allowed to diverge from the original (internally saved) shape. This is a Spring force, i.e., the lesser the stiffness, the softer the Springs and the more deformations that will occur upon collision.
刚度定义了软体的点允许偏离原始(内部保存)形状的程度。这是一个弹簧力,也就是说,弹簧的刚度越小,弹簧越软,碰撞时发生的变形越多。
This setting can also be used to create a springing animation (beginning at 0), for example to catapult away a Soft Body that has fallen onto a given object. The Soft Body will quickly reassume its initial shape.
这个设置也可以用来创建弹跳动画(从0开始) ,例如弹射掉在给定物体上的柔软身体。柔软的身体会很快恢复它最初的形状。
The Map function is described here).
这里描述了 Map 函数)。
This lets you easily stiffen specific regions of a Soft Body, as in the example below. The tire should deform accordingly when it loses pressure. Points on the tire were weighted, with the maximum weighting at the edge of the wheel rim (yellow). This is where the Shape Conservation is at its strongest. Hence, the tire will not deform near the wheel and will not penetrate the wheel (which itself is not a Soft Body).
这使您可以轻松地硬化软体的特定区域,如下面的例子。当轮胎失去压力时,就会相应地变形。点的轮胎加权,与最大的权重轮辋的边缘(黄色)。这是形状保护最强大的地方。因此,轮胎不会在车轮附近变形,也不会穿透车轮(车轮本身不是软体)。
 Default values for all 3 Spring types; at right
with 所有3种 Spring 类型的默认值; 右边为Map 地图 for stiffness added. 为了增加硬度
Tip:
提示:
Default values for all 3 Spring types; at right
with 所有3种 Spring 类型的默认值; 右边为Map 地图 for stiffness added. 为了增加硬度
Tip:
提示:成交量[0. . 100% ]
If the 3 Spring types have only a minimal effect and the majority of the calculation is being taken up by the Shape Conservation, a "pulsating" (variation of volume) effect can result. Increasing the Volume value can eliminate this effect.
如果这三种弹簧类型只有很小的影响,而且大部分的计算是由形状守恒来进行的,那么就会产生“脉动”(体积变化)效果。增加音量值可以消除这种影响。
阻尼[0. . + ∞% ]映射
This value defines the degree of damping (stiffness). The greater the value, the faster the oscillation will end. The Map setting (Point Selection tag or Vertex mpas) lets this be adjusted on point level. The Map function is described here).
这个值定义了阻尼(刚度)的程度。值越大,振荡结束的速度越快。地图设置(点选择标记或顶点 mpas)允许在点级别上进行调整。这里描述了 Map 函数)。
弹性极限[0. . + ∞ m ]地图
Just like individual Springs, those used to maintain shapes can be deformed plastically when they reach a defined value. This is defined using the Elastic Limit value, whose effect is in relation to the Spring’s original Rest Length.
就像单独的弹簧一样,那些用来保持形状的弹簧在达到一个确定的值时也会发生塑性变形。这是用弹性极限值定义的,其效果与弹簧的原始静止长度有关。
Permanent modifications can be made to Soft Bodies using these settings.
永久性的修改可以使用这些设置软体。
The Map function is described here.
这里描述了 Map 函数。
压力
 The cube at the left is inflated resulting in the
shape at the center. At right a Point Selection tag was added to the 左边的立方体膨胀后形成了中心的形状。在右边,点选择标记被添加到Stiffness 僵硬
parameter. 参数
The cube at the left is inflated resulting in the
shape at the center. At right a Point Selection tag was added to the 左边的立方体膨胀后形成了中心的形状。在右边,点选择标记被添加到Stiffness 僵硬
parameter. 参数
This only works on closed objects. The object is inflated by adding a force that pushes the surface Normals in an outward direction. This method is good for inflating collapsed objects, for example.
这只适用于封闭的对象。物体通过增加一个推动表面法线向外方向的力而膨胀。例如,这种方法适用于对折叠对象进行充气。
压力[-∞ . . + ∞]
This Pressure setting works like pressure in the real world - a force that exerts pressure on the entire surface of an object and inflates the object. Positive values will increase and negative values will decrease (creates a vacuum) an object’s volume.
这种压力设置的工作原理类似于现实世界中的压力——一种对物体整个表面施加压力并使物体膨胀的力。正值将增加,负值将减少(造成真空)一个对象的体积。
The next setting, Volume Conservation, can also be used to exert pressure - but is dependent on the object’s volume.
下一个设置,体积守恒,也可以用来施加压力-但是取决于对象的体积。
体积守恒[0. . + ∞]
 When a Soft Body is pressed together its volume
will remain constant when greater 当一个柔软的身体被挤压在一起时,它的体积会保持不变Volume Conservation 体积保存 values are
applied. 应用值
When a Soft Body is pressed together its volume
will remain constant when greater 当一个柔软的身体被挤压在一起时,它的体积会保持不变Volume Conservation 体积保存 values are
applied. 应用值
The Volume Conservation feature applies a force in an attempt to maintain the volume of an object. If the current volume is greater than the volume in rest state the force is directed inwardly and vice-versa. The strength of this force is defined by the Volume Conservation value.
体积守恒特征使用一个力来试图维持物体的体积。如果当前体积大于静止状态下的体积,则力向内,反之亦然。这个力的强度是由体积守恒定义的。
The greater the value the less a body can be compressed, i.e., if the Soft Body is pressed together it will attempt to maintain its initial volume by expanding accordingly in different directions.
值越大,一个物体可以被压缩的就越少,也就是说,如果软物体被压缩在一起,它就会试图通过相应地向不同方向扩张来维持它的初始体积。
 Without Volume Conservation, stretching or
uncontrolled expansion can occur. Pictured at right is the point selection that was fixated via 如果没有体积守恒,可能会发生拉伸或不可控制的膨胀。图片右边是点选择,是固定的通过Stiffness 僵硬.
Without Volume Conservation, stretching or
uncontrolled expansion can occur. Pictured at right is the point selection that was fixated via 如果没有体积守恒,可能会发生拉伸或不可控制的膨胀。图片右边是点选择,是固定的通过Stiffness 僵硬.
阻尼[0. . + ∞% ]
Damps oscillation caused by application of the Pressure effect. The greater the value, the faster the oscillation will end.
阻尼振荡的应用压力效果造成的。越大的值,更快的振荡将结束。